
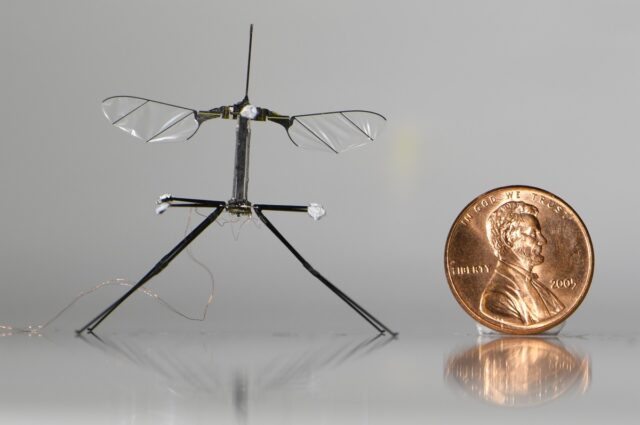
Robobeul este doar puțin mai mare decât un ban. Credit: Laboratorul de microrobotică Harvard
Primul pas a fost efectuarea experimentelor pentru a determina efectele oscilației asupra picioarelor robotizate nou proiectate și a articulațiilor picioarelor. Acest lucru a implicat deranjarea manuală a piciorului și apoi eliberarea acestuia, surprinzând oscilațiile rezultate pe videoclipuri de mare viteză. Acest lucru a arătat că piciorul și articulația au acționat în esență ca un „model subdomat de masă de primăvară”, cu un pic de „creep viscoelastic” pentru o măsură bună. În continuare, echipa a efectuat o serie de experimente de cădere liberă cu mici vehicule manechine cu testare cu testare cu fibră de sticlă, cu masă și inerție similară cu Robobee’s, care surprinde fiecare cădere liberă pe videoclipuri de mare viteză. Aceasta a fost urmată de teste ale diferitelor abordări de decolare și aterizare.
Ultimul pas a fost rularea experimentelor pe secvențe consecutive de decolare și de aterizare folosind Robobee, cu micul robot care decolează dintr -o frunză, trecând, apoi mișcându -se lateral înainte de a se plimba scurt și a ateriza pe o altă frunză din apropiere. Configurația de bază a fost aceeași cu experimentele anterioare, cu excepția plasării unei ramuri a plantelor în arena de captare a mișcării. Robobee a reușit să aterizeze în siguranță pe a doua frunză (sau suprafețe neuniforme similare) pe încercări repetate cu parametri diferiți.
Mergând mai departe, echipa lui Wood va căuta să îmbunătățească în continuare amortizarea mecanică la aterizare, tragând lecții de la albine și țânțari fără stăpân, precum și extinderea către vehicule mai mari. Acest lucru ar necesita o investigație asupra geometriilor mai complexe ale picioarelor, pe autori. Și Robobee trebuie să fie legat în continuare de sistemele de control off-bord. Echipa speră într-o zi să încorporeze electronice la bord cu senzori încorporați.
„Obiectivul pe termen lung este autonomia deplină, dar, în mod interimar, am lucrat prin provocări pentru componente electrice și mecanice folosind dispozitive legate”, ” spuse lemn. „Tethers -ul de siguranță au fost, în mod surprinzător, în calea experimentelor noastre, și aterizarea în siguranță este un pas critic pentru a elimina acele tethers.” Acest lucru ar face Robobee mai viabil pentru o serie de aplicații practice, inclusiv monitorizarea mediului, supravegherea dezastrelor sau roiurile de roboți angajați în polenizare artificială.
Science Robotics, 2025. DOI: 10.1126/scirobotics.adq3059 (Despre Dois)