Oamenii de știință au dezvoltat un robot patruped care își poate folosi cele două picioare din față pentru a ridica și mânui obiecte în timp ce merge pe cele din spate.
Roboții cvadrupede iau de obicei forma câinilor robot, inclusiv Boston Dynamics’ Spot. Ei pot merge pe teren dificil cu viteză și au, de obicei, centrele de greutate scăzute. Majoritatea patrupedelor care manipulează obiecte au două brațe suplimentare care pot ridica și transporta obiecte, ceea ce înseamnă că au șase „membre” în total.
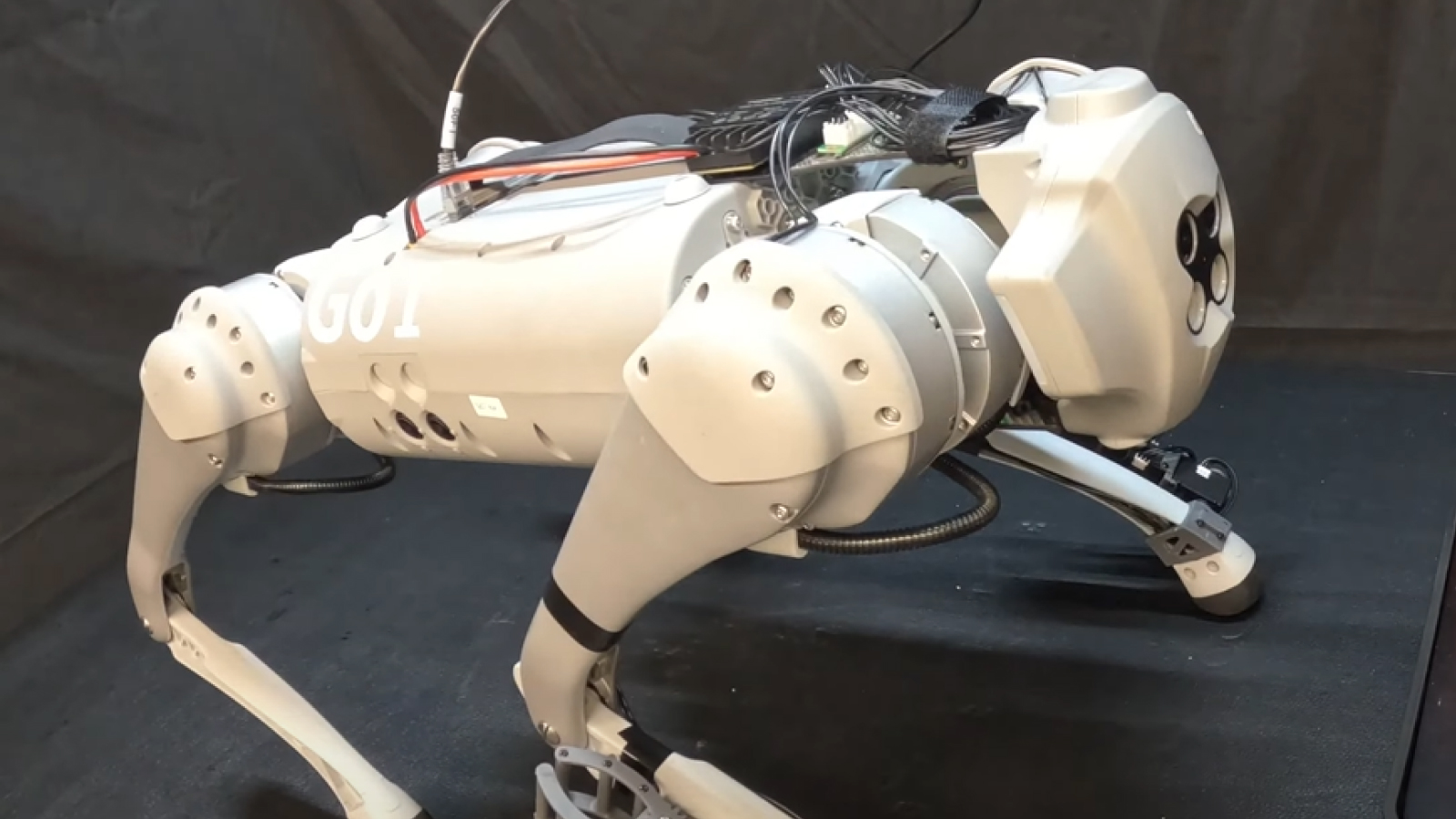
Dar robotul „LocoMan” este unic, deoarece poate trece de la poziția în patru la o poziție în picioare și poate folosi cele două picioare din față pentru a manipula obiecte. Oamenii de știință au subliniat modul în care a funcționat robotul într-un studiu publicat pe 27 martie la arXiv server de pretipărire.
„În această lucrare, prezentăm LocoMan, o abordare nouă care îmbunătățește dexteritatea de manipulare a roboților patrupede prin integrarea unor locomo-manipulatoare ușoare proiectate, extinzând spațiul lor de lucru operațional și permițând controlul precis asupra sarcinilor complexe de manipulare 6D”, au spus oamenii de știință în cadrul studiului. hârtie.
LocoMotion
Designul combină mobilitatea unui patruped cu funcționalitatea „manipulatoarelor” care, în acest caz, se referă la piese asemănătoare mâinilor de pe robot care pot controla sau manipula un obiect. Cheia aici este că abilitatea de a manipula obiecte a fost dezvoltată fără a compromite agilitatea LocoMan.
Cu toate acestea, picioarele sale multifuncționale au demonstrat, de asemenea, versatilitate în medii provocatoare, cum ar fi spațiile restrânse și terenurile stâncoase. cu robotul prezentând mișcări precise și stabile în timpul sarcinilor care necesitau „coordonare complexă cu două brațe”. Acest lucru îl diferențiază pe LocoMan de alți roboți patrupede.
Legate de: Urmăriți un „câine robot” care se luptă printr-un curs de parkour de bază cu ajutorul AI
Designul său s-a inspirat din „anatomia brațelor umane”, au spus cercetătorii în lucrarea lor, cu locomo-manipulatoare personalizate care folosesc articulațiile existente adăugate în zona gambei picioarelor din față.
Aceste articulații ale picioarelor sunt similare cu articulațiile cotului și umărului la om, în timp ce articulațiile adăugate au similarități cu încheieturile umane. Au încorporat patru actuatoare compacte (componentele care controlează mișcarea) care oferă feedback privind poziția, viteza și cuplul. Pentru a face locomotoarele mai compacte, echipa a proiectat prinderea ca două perechi de fălci rotative cu angrenare angrenaj, permițând deschiderea și închiderea simetrică a prinderii cu un singur motor.

Pentru a integra loco-manipulatorul perfect cu structura existentă a robotului cu patru picioare, articulațiile trebuiau să se alinieze și să permită acțiuni de mișcare și de prindere fără ca niciuna dintre aceste capacități să o împiedice pe cealaltă.
Cercetătorii au evaluat LocoMan cu experimente din lumea reală, cum ar fi deschiderea ușilor, împingerea ștecherelor în prize și ridicarea obiectelor în spații înguste. Echipa a remarcat în studiu că robotul a finalizat toate sarcinile și a arătat „o dexteritate remarcabilă”.
„Cercetarea noastră oferă o perspectivă diferită a roboților inteligenți. În loc să reproducem oameni cu o morfologie similară, ne-am dori să oferim un robot complementar care poate face ceea ce oamenii ar putea să nu vrea să facă”, a spus.
, profesor asociat de inginerie mecanică la Universitatea Cornell, într-o declarație. „LocoMan face posibil ca roboții patrupede să efectueze sarcini complexe de manipulare în spații înguste.”
Oamenii de știință doresc acum să pună LocoMan la încercare în setari și situații mai provocatoare din lumea reală. De asemenea, ei intenționează să adauge robotului algoritmi de viziune computerizată și de învățare automată în cercetările lor în viitor.