
Întors din morți –
Robotul conceput să imite o creatură enigmatică a mării ne poate ajuta să înțelegem cum s-a mișcat.

Până acum, când oamenii de știință și inginerii au dezvoltat roboți moi inspirați de organisme, ei s-au concentrat pe exemplele de viață moderne. De exemplu, am raportat anterior despre aplicațiile de robot soft care a imitat calmarullăcuste și gheparzi. Pentru prima dată, totuși, o echipă de cercetători a combinat acum principiile roboticii moi și ale paleontologiei pentru a construi o versiune soft-robot a pleurocystitidi, o creatură veche a marinei care a existat acum 450 de milioane de ani.
Pleurocistitiditele sunt legate de echinoderme moderne ca stelele de mare și stelele fragile. Organismul are o mare importanță în evoluție, deoarece se crede că este primul echinoderm care era capabil să se miște: a folosit o tulpină musculară pentru a se deplasa pe fundul mării. Dar, din cauza lipsei de dovezi fosile, oamenii de știință niciodată clar înțeles modul în care organismul a folosit de fapt tulpina pentru a se deplasa sub apă. „Deși obiceiurile sale de viață și postura sunt rezonabil de bine înțelese, mecanismele care controlează mișcarea tulpinii sale sunt foarte controversate”, autorii unui studiu publicat anterior, care se concentrează pe tulpina echinodermului. Notă.
Replica nou-dezvoltată a unui robot moale (numită și „Rombotul”) a unei pleurocistitidi a permis cercetătorilor să decodeze mișcarea organismului și diverse alte mistere legate de evoluția echinodermelor. În studiul lor, ei susțin, de asemenea, că replica va servi drept bază pentru paleobionica, un domeniu relativ nou care utilizează robotica moale și dovezi fosile pentru a explora diferențele biomecanice dintre formele de viață.
Realizarea unei replică a unui robot moale
Există multe motive pentru care oamenii de știință nu încearcă să facă o versiune de robot moale a ceva dispărut și la fel de vechi ca pleurocystitid. Este dificil de înțeles cum s-a mișcat organismul, deoarece nu există un analog modern. În plus, dovezile fosile oferă doar informații limitate despre cum s-a mișcat un organism. De exemplu, în timp ce unii cercetători sugerează că pleurocystitid a înotat, se ceartă alții că prezenta mișcări de sculling sau sinusoidale.
Pentru a depăși aceste provocări, cercetătorii au lucrat cu paleontologi specializați în echinoderme. Ei au colectat imagini fosile, scanări CT și toate celelalte dovezi pe care le-au putut găsi și apoi au folosit aceste date pentru a proiecta corpul și tulpina pleurocystitidei. Ulterior, au folosit turnarea elastomerului și imprimarea 3D pentru a construi diferitele părți ale robotului pe baza designului.
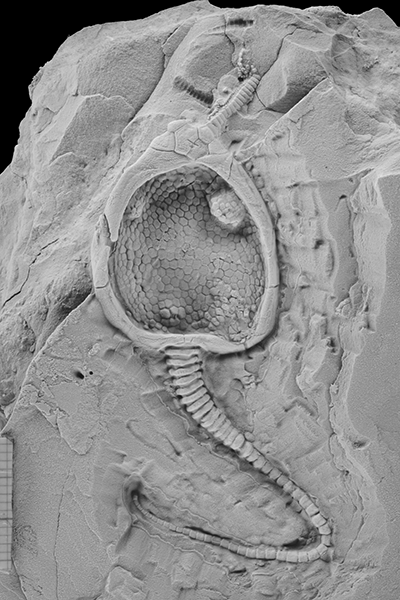
Mărește / Organismul dispărut care a servit drept bază pentru proiectarea robotului.
Când au încercat să facă robotul să se miște folosind tulpina (ca pleurocistitiditatea adevărată), s-au confruntat cu o altă provocare. „Actuatorul moale folosea sârmă de nitinol, un aliaj cu memorie de formă (SMA) care se ardea adesea și se întindea permanent. Acest lucru a necesitat fabricarea multor tulpini (au fost făcute aproape 100 de tulpini) și înlocuirea lor atunci când s-au stricat”, a declarat Richard Desatnik, cercetător principal și doctorand la Universitatea Carnegie Mellon (CMU), pentru Ars Technica.
A fost, de asemenea, o provocare să reproducem tulpina musculară moale a pleurocistiturilor, deoarece cercetătorii nu au putut folosi motoare convenționale, care sunt prea voluminoase și rigide. „În schimb, trebuia să folosim un fir special de „mușchi artificial” compus din aliaj de nichel și titan care se contractă ca răspuns la stimularea electrică. Acest lucru ne-a permis să creăm un actuator asemănător unei tulpini care se potrivea cu flexibilitatea unei tulpini musculare naturale”, a adăugat Carmel Majidi, autor principal al studiului și profesor de inginerie mecanică la CMU.
Cercetătorii au efectuat apoi câteva simulări pentru a vedea cum s-ar putea mișca Rhombot sub apă. Ei au descoperit că o tulpină mai lungă a dus la o mișcare mai bună. Potrivit studiului, acest lucru a fost în concordanță cu dovezile fosile care sugerează evoluția tulpinilor mai lungi în pleurocystitids în timp.
După ce au studiat simulările, cercetătorii au plasat robotul într-un rezervor de pește de 42 × 42 inci, cu o suprafață de fund similară cu fundul mării. Ei au efectuat mai multe teste, fiecare cu durata de două minute, pentru a examina mișcarea robotului. „Am demonstrat că mersurile largi și mari ar fi putut fi cele mai eficiente pentru aceste echinoderme și că creșterea lungimii tulpinii ar fi putut crește semnificativ viteza cu un cost suplimentar minim de energie”, cercetătorii. Notă în studiul lor.
Studierea animalelor dispărute
A face replici funcționale ale unor creaturi antice dispărute folosind paleobionica sună destul de interesant, dar ce ne pot spune roboții că înregistrarea fosilelor nu poate? Când i-am pus această întrebare lui Majidi, el a explicat asta concentrându-se doar pe roboți inspirați de speciile existenteoamenii de știință ar putea pierde o mare oportunitate de a învăța principiile biologice și evolutive care au guvernat viața a numeroase alte forme de viață.
De exemplu, conform unei estimări, organismele vii moderne includ doar 1 la sută din toată viața care a existat vreodată pe Pământ. „Putem începe să învățăm din cele 99 la sută dintre specii care au cutreierat cândva pământul, în loc de doar 1 la sută. Există o mulțime de creaturi care au avut succes de milioane de ani și s-au stins din cauza schimbărilor drastice din mediul lor”, a spus Majidi pentru Ars Technica.
Replicile roboților moi ale unor astfel de creaturi îi echipează pe paleontologi cu un instrument puternic pentru a crea bancuri de testare experimentale pentru examinarea ipotezelor despre modul în care aceste forme de viață antice s-au mișcat și au evoluat.
Studiul actual demonstrează cu succes că robotica moale poate fi utilizată pentru a „resuscita” organisme dispărute și pentru a studia locomoția și biomecanica acestora. „Nu a mai fost făcut niciodată în comunitatea soft-robotics și sperăm că va inspira mai multe cercetări în domeniu”, a adăugat Desatnik.
PNAS, 2023. DOI: 10.1073/pnas.2306580120 (Despre DOI)
Rupendra Brahambhatt este un jurnalist și regizor cu experiență. El acoperă știri despre știință și cultură și, în ultimii cinci ani, a lucrat activ cu unele dintre cele mai inovatoare agenții de știri, reviste și mărci media care operează în diferite părți ale globului.