Oamenii de știință au proiectat un robot despre care susțin că ar putea să sară într-o zi 400 de picioare (120 de metri) – suficient de înalt pentru a curăța Statuia Libertății într-o singură trecere. Ar putea să sară chiar și până la 650 de picioare (200 m) pe Lună.
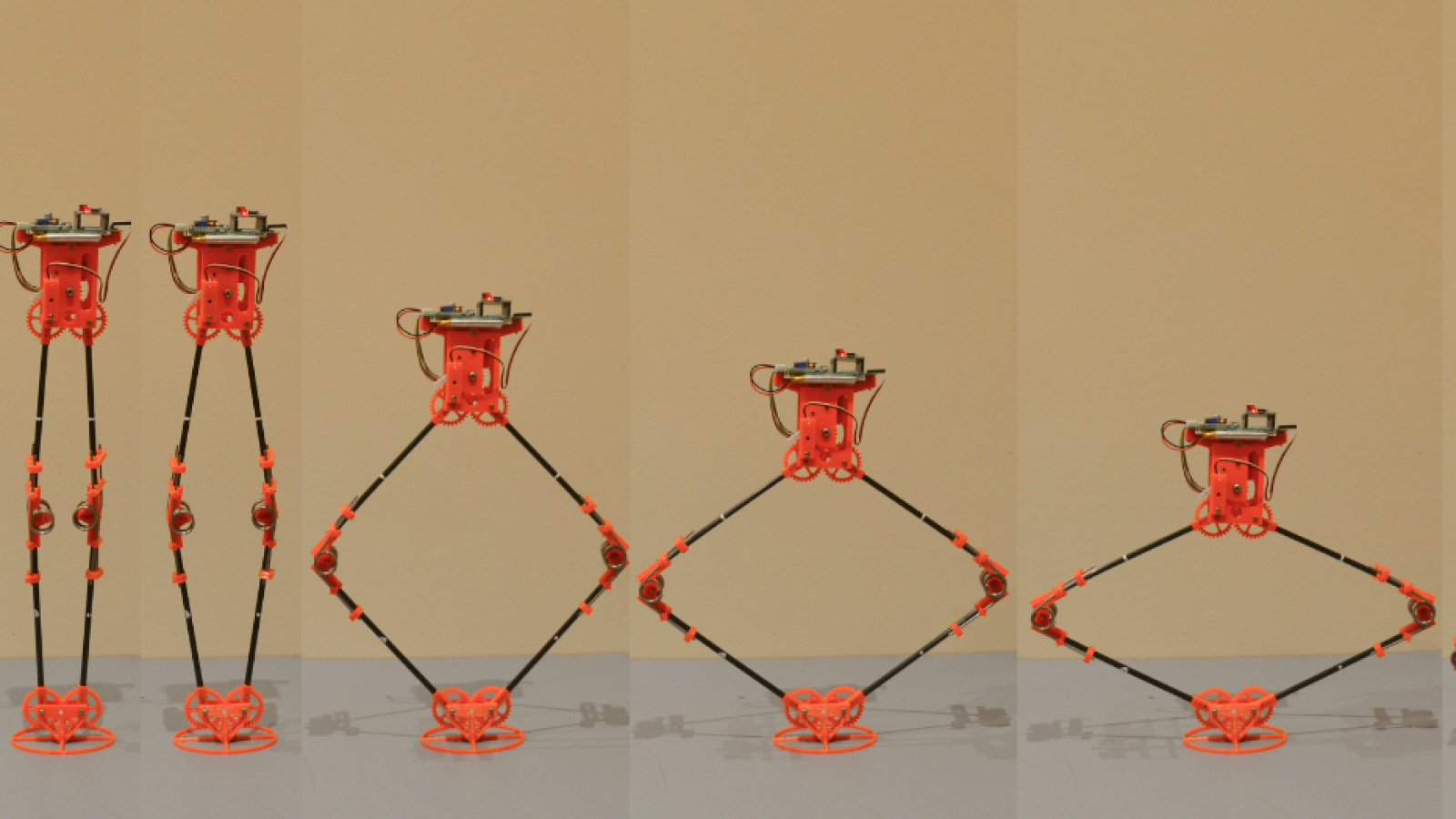
Robotul care sări în înălțime este proiectat pentru a explora terenuri dificile pe care roboții convenționali s-ar strădui să le traverseze, cum ar fi sistemele de peșteri, pădurile și eventual alte planete. Dispune de picioare unice în formă de prismă, cu arcuri extensibile, concepute pentru a maximiza transferul de energie elastică în energie cinetică în timpul unui salt.
Cercetătorii au spus că designul lor le-ar putea permite roboților să sară la înălțimi de multe ori mai mari decât propria lor și de peste șase ori mai mari. decât recordul actual. Ei și-au publicat concluziile pe 24 mai în jurnal Teoria mecanismelor și mașinilor.
Pentru a-și demonstra teoria de proiectare, oamenii de știință au construit un robot înalt de 15,7 inchi (40 cm) care ar putea sări mai mult de 5 picioare (1,6 m) în aer.
„Deși roboții săritori există deja, există câteva provocări mari în proiectarea acestor mașini de săritură, principala fiind să sari suficient de sus pentru a depăși obstacole mari și complicate”, coautor al studiului. John Loun asociat de cercetare în robotica spațială la Universitatea din Manchester, a spus în o declarație. Designul nostru ar îmbunătăți în mod dramatic eficiența energetică și performanța roboților săritori acționați de arc.”
Legate de: Urmăriți un „câine robot” care se luptă printr-un curs de parkour de bază cu ajutorul AI
Roboții convenționali sunt de obicei echipați cu roți sau, în cazul unor mașini de genul Atlasul Boston Dynamics și Loc, două sau patru picioare. Deși aceste modele funcționează bine pe teren simplu, ele nu sunt adepți să abordeze obstacole precum stânci sau suprafețe abrupte și inegale. Aici este util un design de sărituri.
Un salt uriaș pentru roboți
Roboții săritori folosesc de obicei motoare pentru a stoca energie într-un arc și apoi eliberează această energie pentru a propulsa robotul în sus. Amplificarea puterii – un mecanism observat la animale precum puricii și lăcustele prin care energia elastică stocată este convertită în energie cinetică – permite arcurilor să genereze o putere de ieșire mai mare decât motoarele independente, ceea ce duce la salturi mai mari.
Anterior modele de roboți săritori au încorporat amplificarea puterii, dar sunt predispuși să decoleze înainte ca energia lor de primăvară să fie complet eliberată, au spus oamenii de știință, ceea ce înseamnă că energia lor elastică stocată nu este complet convertită în energie cinetică. Acești roboți tind, de asemenea, să risipească energie deplasându-se dintr-o parte în alta sau rotindu-se, în loc să sară drept în sus.
„Au fost atât de multe întrebări de răspuns și decizii de luat cu privire la forma robotului, cum ar fi, ar trebui să aibă picioare pentru a împinge de pe pământ ca un cangur sau ar trebui să fie mai mult ca un piston proiectat cu un arc uriaș?” coautor Ben Parslewun lector superior în inginerie aerospațială la Universitatea din Manchester, a declarat în declarație.
Pentru a afla ce tip de design ar fi cel mai bun, oamenii de știință au examinat două modele de roboți: unul cu un sistem „prismatic” în linie dreaptă și unul cu un sistem rotativ.
În modelul prismatic, picioarele robotului s-au mișcat într-o mișcare asemănătoare unui piston, asemănătoare cu un stick de pogo. Cu toate acestea, greutatea suplimentară din partea de jos a robotului a creat un efect de inerție, ceea ce înseamnă că arcul nu s-a putut extinde complet înainte ca robotul să părăsească solul.
Între timp, modelul rotativ prezenta picioare care se mișcau într-o mișcare circulară, similară cu cea a unui cangur. În acest model, mișcarea de rotire a picioarelor a făcut ca robotul să părăsească pământul înainte ca arcurile să-și fi eliberat complet energia stocată – din nou, reducând înălțimea și eficacitatea săriturii.
Pentru a rezolva aceste probleme, echipa a combinat cele mai bune dintre ambele modele. Deplasând cea mai mare parte a greutății robotului în sus și făcând partea inferioară mai ușoară și mai rațională, aceștia au reușit să-i îmbunătățească stabilitatea și eficiența energetică. De asemenea, prin utilizarea picioarelor prismatice cu mișcare dreaptă cu arcuri care se extind liniar, oamenii de știință au reușit să atenueze problema decolărilor întârziate sau premature.
Se lucrează acum pentru a controla direcția salturilor și a valorifica energia cinetică generată atunci când robotul aterizează, care ar putea fi folosită pentru a crește numărul de sărituri pe care le poate face cu o singură încărcare, au spus oamenii de știință. Echipa va explora, de asemenea, modele mai compacte, potrivite pentru misiunile spațiale.