Oamenii de știință de la MIT au dezvoltat un inedit bazat pe viziune inteligenţă artificială (AI) Sistem care se poate învăța cum să controleze practic orice robot fără utilizarea senzorilor sau a pretratării.
Sistemul adună date despre arhitectura unui robot dat folosind camere, în același mod în care oamenii își folosesc ochii pentru a învăța despre ei înșiși în timp ce se mișcă.
Acest lucru permite controlorului AI să dezvolte un model de auto-învățare pentru operarea oricărui robot-oferind în esență mașinilor un sentiment uman de conștientizare fizică de sine.
Cercetătorii au obținut această descoperire prin crearea unei noi paradigme de control care folosește camere pentru a cartografia un flux video al „Visuomotor Jacobian Field” al unui robot, o reprezentare a punctelor 3D vizibile ale mașinii, la actuatoarele robotului.
Modelul AI poate prezice apoi mișcări de precizie-motorie. Acest lucru face posibilă transformarea arhitecturilor robotului netradițional, cum ar fi robotica moale și cele concepute cu materiale flexibile, în unități autonome, cu doar câteva ore de antrenament.
„Gândește -te la modul în care înveți să -ți controlezi degetele: rătăciți, observați, vă adaptați”, a explicat Sizhe Lester Lidoctorand la MIT CSAIL și cercetător principal al proiectului, într -un Comunicat de presă. “Asta face sistemul nostru. Experimentează cu acțiuni aleatorii și își dă seama care controlează mută ce părți ale robotului.”
Soluțiile tipice de robotică se bazează pe inginerie de precizie pentru a crea mașini la specificații exacte care pot fi controlate folosind sisteme pre-instruite. Acestea pot necesita senzori scumpi și modele AI dezvoltate cu sute sau mii de ore de reglare fină pentru a anticipa fiecare permutare posibilă a mișcării. Prindeți obiecte cu apendice asemănătoare cu mâna, de exemplu, rămâne o provocare dificilă în arenele atât ale ingineriei mașinilor, cât și ale controlului sistemului AI.
Înțelegerea lumii din jurul tău
Utilizarea soluției de camere de cartografiere „Jacobian Field”, în schimb, oferă o soluție cu costuri reduse de înaltă fidelitate pentru provocarea automatizării sistemelor de robot.
Echipa și -a publicat concluziile pe 25 iunie în jurnal Natură. În ea, ei au spus că lucrarea a fost concepută pentru a imita metoda creierului uman pentru a învăța să controleze mașinile.
Capacitatea noastră de a învăța și reconstrui configurațiile 3D și de a prezice mișcarea în funcție de control este derivată doar din viziune. Potrivit lucrării, „Oamenii pot învăța să aleagă și să plaseze obiecte în câteva minute” atunci când controlează roboții cu un controler de jocuri video și „singurii senzori de care avem nevoie sunt ochii noștri”.
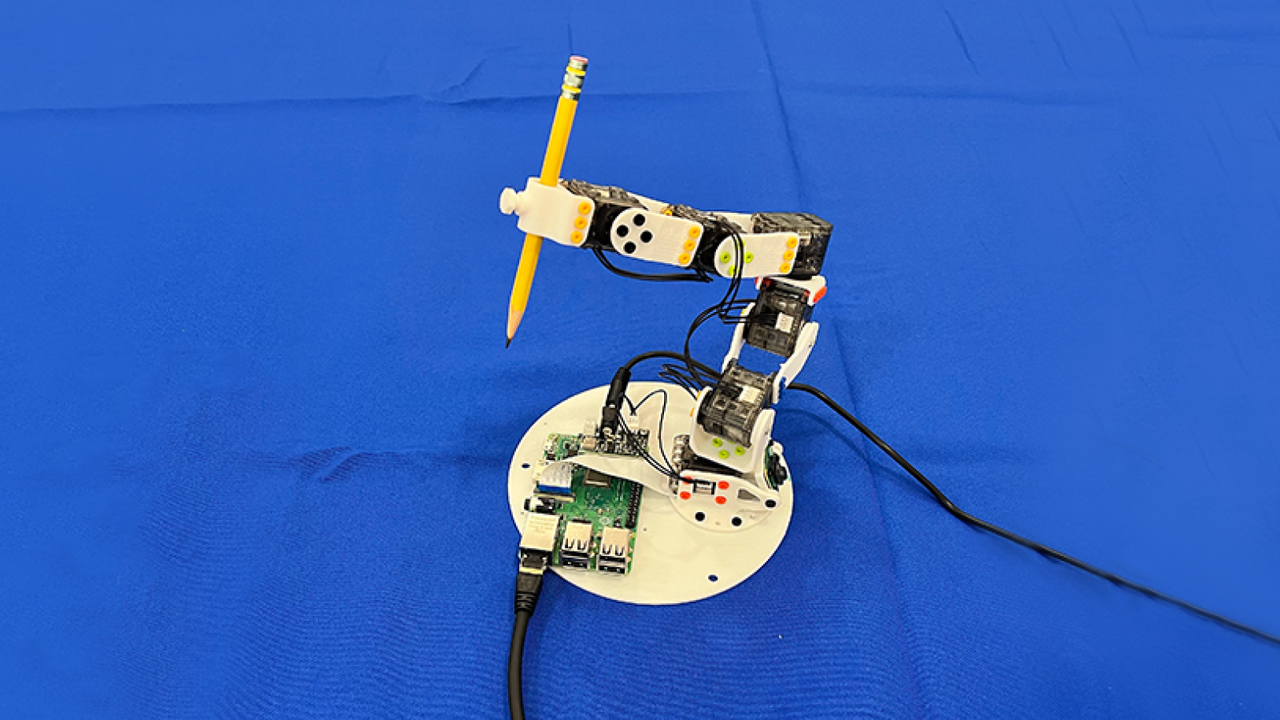
Cadrul sistemului a fost dezvoltat folosind două-trei ore de videoclipuri cu mai multe vizualizări ale unui robot care execută comenzi generate aleatoriu capturate de 12 camere video RGB-D de calitate de consum.
Acest cadru este format din două componente cheie. Primul este un model de învățare profundă care permite în esență robotului să stabilească unde și apendicele sale sunt în spațiu tridimensional. Acest lucru îi permite să prezică modul în care poziția sa se va schimba pe măsură ce sunt executate comenzi de mișcare specifice. Al doilea este un program de învățare a mașinilor care traduce comenzile generice de mișcare în cod pe care un robot îl poate înțelege și executa.
Echipa a testat noua paradigmă de antrenament și control prin evaluarea eficienței sale împotriva metodelor tradiționale de control bazate pe camere. Soluția de câmp jacobian a depășit acele sisteme de control 2D existente în precizie – mai ales atunci când echipa a introdus ocluzie vizuală care a determinat ca metodele mai vechi să intre într -o stare de eșec. Mașinile care folosesc metoda echipei, cu toate acestea, au creat cu succes hărți 3D navigabile, chiar și atunci când scenele au fost parțial oculate cu dezordine aleatorii.
Odată ce oamenii de știință au dezvoltat cadrul, acesta a fost aplicat apoi la diverși roboți cu arhitecturi variate. Rezultatul final a fost un program de control care nu necesită nicio intervenție umană suplimentară pentru a antrena și a opera roboți folosind doar o singură cameră video.