Hula-Hoop este una dintre cele mai cunoscute jucării din istorie, dar știința din spatele ei a primit puțină atenție. Unii dintre noi suntem maestri de twirler, în timp ce alții nu pot gestiona mai mult de un spin. Deci, cum se împiedică căderea de hula în timp ce se învârt și de ce unii dintre noi suntem mai buni decât alții?
Cuplurile moderne de hula sunt inele de plastic pe care le răsuciți în jurul corpului, mișcându-vă șoldurile. Această mișcare de pivotare este similară cu cea văzută în dansul hawaian cunoscut sub numele de Hula (de aici și numele).
Există dovezi despre oamenii care fac o învârtire asemănătoare cu hula-hoop „încă din 500 î.Hr.”, a spus Olivia Pomerenkcandidat doctoral la matematică la Universitatea New York. Se arată din nou și din nou „într -o multitudine de culturi ca formă de recreere, ceremonie religioasă sau exerciții fizice”.
Având în vedere istoria îndelungată a activității, s -ar putea să credeți că „a fost studiată până la moarte în acest moment, dar de fapt nu”, a spus Pomerenk pentru Live Science. Până de curând, cercetările privind învârtirea hula-hoop s-a limitat în general la modele bidimensionale ale unui cerc de răsucire, „mai degrabă decât la sistemul 3D complet”, a menționat ea. Ca atare, această lucrare anterioară nu a putut răspunde la modul în care Hula-Hoops poate împiedica să cadă.
Într -un studiu din 2024 publicat în Jurnal PNASPomerenk și colegii săi au decis să investigheze această întrebare de învârtire a capului.
“Laboratorul nostru tinde să graviteze spre aceste sisteme ciudate, aparent simple”, a spus Pomerenk. „Multe probleme pe care le studiem, atunci când sunt descrise, provoacă reacția:„ Așteptați, cum nu a rezolvat deja nimeni asta? ” Această problemă de hula-hoop nu este diferită. “
Înrudite: Putem opri timpul?
Pentru a arunca lumină asupra întrebării, Pomerenk și colegii ei au creat robotul în miniatură Hula-Hoopers. Acestea sunt articole din plastic tipărite 3D, care aveau o înălțime de aproximativ 6,7 inci (17 centimetri) și veneau într-o varietate de forme, cum ar fi cilindri, conuri și ochelari de oră. Apoi, au făcut ca formele să se girat cu un motor pentru a se învârti în jurul cercurilor de aproximativ 6 cm (15 cm) lățime și au folosit software-ul computerului pentru a analiza înregistrările video de mare viteză ale mișcărilor rezultate.
Cercetătorii au descoperit că o învârtire stabilă a cercului în jurul acestor roboți a fost posibilă, având în vedere o serie de mișcări sau corpuri de girație. Pentru ca o învârtire stabilă să apară, trebuie să începeți aruncând cercul cu o cantitate suficientă de viteză în aceeași direcție cu girația corpului. După acel moment, Forța centrifugă Iar fricțiunea de la rulare poate menține cercul învârtindu -se în mod stabil.
Cu toate acestea, păstrarea cercului împotriva gravitaţie Pentru o perioadă semnificativă de timp este mai dificil. În mod ideal, „corpul trebuie să aibă„ șolduri ”pentru a oferi unghiul adecvat pentru a împinge cercul, dar și o„ talie ”cu curbe pentru a -l ține în loc”, a spus autorul senior al studiului Studiul Leif Ristrophun matematician aplicat și fizician experimental la Universitatea New York.
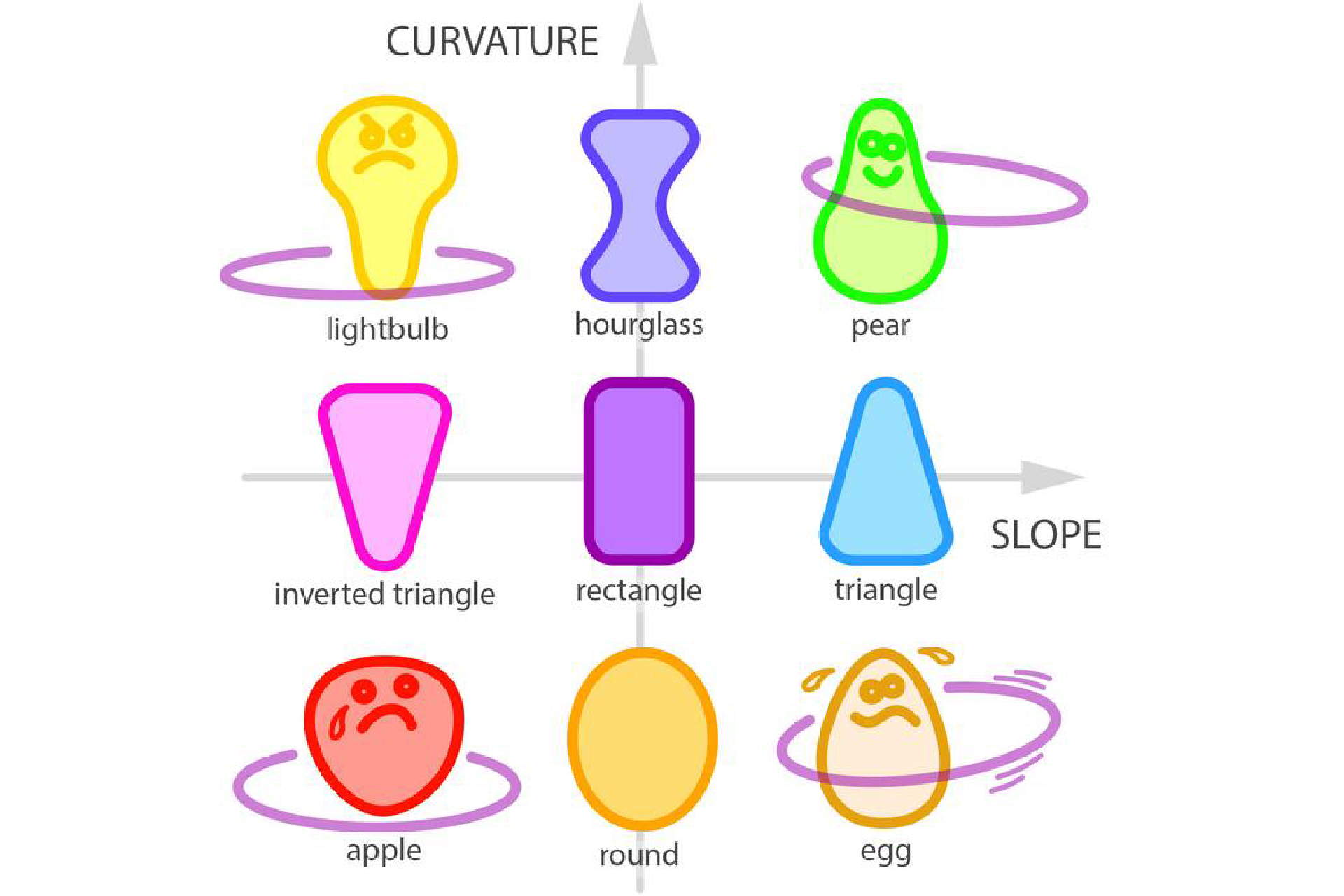
Aceste descoperiri au sugerat că persoanele cu forme de clepsidră pot fi hoopers naturale. Cu toate acestea, „Sperăm că nimeni nu ne ia rezultatele pentru a însemna că nu pot fi hula din cauza formei corpului lor”, a spus Ristroph Science Live. „Credem că toată lumea poate și, probabil, diferite forme ar putea depune un efort suplimentar sau o strategie diferită de ceea ce am investigat în experimentele noastre.”
Rezultatele nu numai că ajută la explicarea unei activități familiare, dar slab înțelese, dar pot indica și o varietate de aplicații care implică „transformarea unui tip de mișcare în alta sau suspendarea și poziționarea obiectelor fără a fi nevoie să le prindă sau să le înțelegem”, a spus Ristroph.
De exemplu, cu doar o ușoară răsucire a corpului lor, un bun twirler hula-hoop poate trimite un cerc care zboară pe orbite mari, a menționat Ristrof. Acest lucru ar putea inspira modalități noi de „recoltare sau recuperare a energiei din vibrații”, a explicat el.
O altă aplicație posibilă ar putea implica controlul obiectelor fără a le ține de fapt, a spus Pomerenk. De exemplu, studiul a prezentat o modalitate relativ simplă de a controla poziția verticală a unui cerc de răsucire de -a lungul unui corp fără a -l înțelege.
„Dacă puteți ridica ceva în sus sau puteți muta ceva în jos într -o manieră controlată, fără a -l ține vreodată într -un sens tradițional, acest lucru ar putea fi util în prindere robotică – de exemplu, deținerea unuia sau mai multor articole, sau chiar poate în transportul eficient al articolelor vertical Într -o fabrică sau construcții “, a spus Pomerenk.