Dispozitivul se poate apuca ca o mână, se poate târî pe podea sau poate sări în sus, doar trăgând pe un mușchi simplu.
Credit: Universitatea Națională din Seul
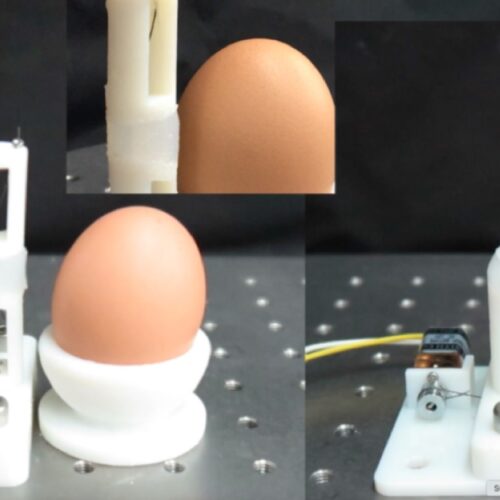
Un fascicul de crătare a ouălor se bazează pe un mecanism de inversare a cuplului hiperelastic similar cu cel utilizat de creveții de mantis și purici de sărituri. Credit: Universitatea Națională din Seul.
De obicei, ne gândim la roboți ca fiind confecționați din materiale dure și rigide, dar robotica moale încearcă să construiască dispozitive robotice din materiale mai flexibile care imită proprietățile celor care se găsesc la animalele vii. Exemplu de caz: Inginerii coreeni au construit roboți moi capabili de mișcări articulare rapide și puternice, folosind același mecanism care oferă creveților mantisului un pumn atât de puternic, potrivit unui hârtie nouă Publicat în revista Science Robotics.
Ca Am raportat anterior, Creveți de mantis vin în multe soiuri diferite; Există aproximativ 450 de specii cunoscute. Dar, în general, pot fi grupate în două tipuri: cele care își înjunghie prada cu apendice asemănătoare cu sulița („Spearers”) și cele care își zdrobesc prada („Smashers”) cu gheare mari, rotunjite și asemănătoare cu ciocanul („apendice raptoriale “). Aceste greve sunt atât de rapide (până la 23 de metri pe secundă, sau 51 mph) și puternice, ele produc adesea bule de cavitație în apă, creând un val de șoc care poate servi drept o lovitură de urmărire, uimitoare și uneori ucigând prada . Uneori, o grevă poate produce chiar Sonoluminescențăprin care bulele de cavitație produc un scurt fulger de lumină pe măsură ce se prăbușesc.
Conform Un studiu din 2018secretul acelui pumn puternic pare să se ridice nu din mușchii voluminoși, ci din structura anatomică încărcată cu arc a brațelor creveților, asemănătoare cu un arc și săgeată sau cu o trapă de motocicletă. Mușchii creveților se trag pe o structură în formă de șa în braț, determinându-l să se îndoaie și să stocheze energia potențială, care este eliberată cu balansarea ghearei asemănătoare clubului. Este, în esență, un mecanism asemănător zăvorului (tehnic, acționarea arcului mediat de zăpadă sau LAMSA), cu structuri mici în tendoanele musculare numite sclerite care servesc drept zăvor.
Nu este prima dată când oamenii de știință au privit creveții Mantis ca o inspirație pentru robotică. În 2021am raportat despre un cercetător de la Harvard care a dezvoltat un Model biomecanic Pentru apendicele puternice a creveților Mantis și a construit un robot minuscul pentru a imita această mișcare. Ceea ce este neobișnuit în creveții Mantis este faptul că există o întârziere de un milisecundă între când are loc acțiunea de dezlegare și de prindere.
Echipa Harvard a identificat patru faze de izbitoare distincte și a confirmat că este geometria mecanismului care produce accelerația rapidă după dezlegarea inițială de către scleriți. Întârzierea scurtă poate ajuta la reducerea uzurii mecanismelor de blocare în ceea ce privește utilizarea repetată.
Noi tipuri de mișcare
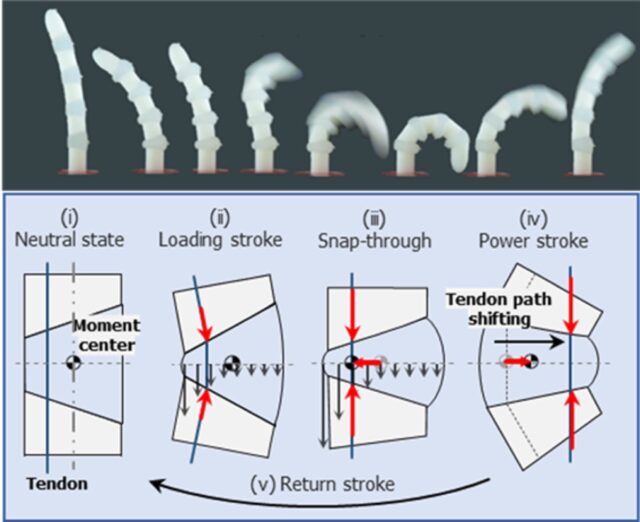
Principiul de funcționare al mecanismului de inversare a cuplului hiperelastic (HETRM) implică comprimarea unei articulații elastomerice până când ajunge la un punct critic, unde energia stocată este eliberată instantaneu. Credit: Science Robotics, 2025
Coautorul Kyu-Jin Cho de la Universitatea Națională din Seul a devenit interesat de robotica soft ca student absolvent, când a participat la Robosoft Grand Challenge. O parte din cercetarea sa a implicat testarea puterii așa-numitelor „manipulatoare robotizate moi”, un tip folosit adesea în liniile de asamblare pentru sudare sau pictură, de exemplu. El a observat unele deformări neintenționate în formă sub forță aplicată și și -a dat seama că mecanismul de bază era similar cu modul în care pumni de creveți de mantis sau modul în care puricii reușesc să sară atât de sus și departe în raport cu dimensiunea lor.
De fapt, Echipa lui Cho construit anterior un Mecanism de catapultă inspirat de purici Pentru roboți de sărituri în miniatură, folosind mecanismul de inversare a cuplului hiperelastic (HETRM) laboratorul său. Exploatarea inversării cuplului implică de obicei încorporarea componentelor mecanice complicate. Cu toate acestea, „mi -am dat seama că aplicarea [these] Principiile roboticii soft ar putea permite crearea de noi tipuri de mișcare fără mecanisme complexe “, A spus Cho.
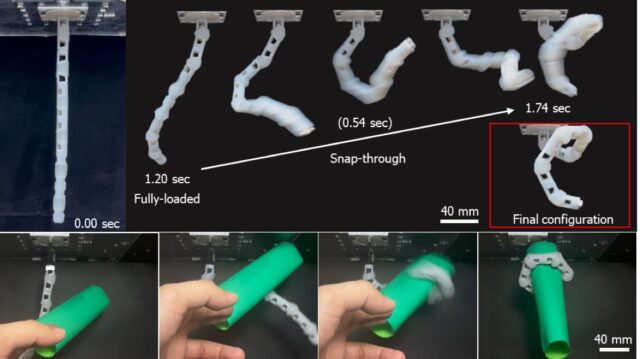
Acum este construit pe acea lucrare pentru a încorpora HETRM într -un braț robotizat moale care se bazează pe proprietățile materiale mai degrabă decât pe un design structural. Este practic un fascicul moale cu segmente alternative hiperelastice și rigide.
„Robotul nostru este confecționat din materiale moi, întinse, cam ca cauciuc”, a spus Cho. “În interior, are o parte specială care stochează energie și o eliberează deodată – BAM! – pentru a face robotul să se miște super rapid. Funcționează un pic ca și cum o ramură de copac îndoită se întoarce repede sau cum o purici sare într -adevăr departe. Acest robot poate apuca lucruri ca o mână, se poate târâ pe podea sau chiar poate sări sus și totul se întâmplă doar trăgând pe un mușchi simplu. ”
Folosind HETRM, energia poate fi stocată într -o articulație flexibilă și apoi eliberată instantaneu, permițându -i să înfășoare obiecte, la fel ca o caracatiță. Credit: Science Robotics, 2025
Realizarea brațului robotizat moale a implicat o combinație de imprimare 3D și modelare siliconică, pe autori. Mucegaiul avea o parte superioară și inferioară, cu segmente rigide fixate în matrița de jos; Mucegaiul de sus avea găuri corespunzătoare cu cavitățile pentru segmentele moi. Cercetătorii au folosit tăierea cu laser pentru a face ca foaia acrilică să fie „matrițe cu fante” între segmentele rigide. Apoi au turnat silicon în matrița de jos, au așezat matrița superioară peste ea și au turnat mai mult silicon prin găurile matriței superioare pentru a crea segmentele moi.
Matrițele și placa au fost îndepărtate după trei ore de întărire, iar echipa a aplicat adezivul de siliciu pentru a lega segmentele rigide de îmbinările moi. Au folosit un fir de titan ca tendon de acționare, folosind grăsime de teflon pentru a reduce frecarea. De asemenea, au folosit markeri imprimați 3D de-a lungul segmentelor rigide pentru urmărirea imaginilor.
Cho și colab. În continuare, a testat capacitățile brațului lor robotizat prin montarea acestuia pe o platformă, folosind un motor pentru a trage tendonul și un sistem de măsurare cu trei puloții pentru a măsura forța tendonului. Când motorul a tras tendonul într -o direcție, fasciculul s -a comprimat. Tensiunea a fost crescută treptat până când fasciculul s -a prins în direcția opusă, revenind în cele din urmă la poziția inițială.
Echipa a demonstrat brațul robotizat, amândoi mângâind ușor un ou (fără HETRM), cât și crăpând coaja (cu HETRM). Cercetătorii au construit un robot cu două picioare, care ar putea să se târască ca o broască țestoasă și să folosească tentaculele asemănătoare cu caracatița, compuse din șase articulații HETRM dispuse în perechi pentru a se propulsa pe nisip umed inegal. De asemenea, au conceput o prindere moale, capabilă să apuce o minge de ping-pong care se încadrează sau o mandarină sau să țină obiecte delicate precum o bucată de jeleu sau o cutie origami fără a le zdrobi.
Science Robotics, 2025. DOI: 10.1126/scirobotică.ADO7696 (Despre Dois)

Jennifer este un scriitor senior la Ars Technica, cu un accent deosebit pe locul în care știința întâlnește cultura, care acoperă totul, de la fizică și subiecte interdisciplinare conexe până la filmele și serialele sale de televiziune preferate. Jennifer locuiește în Baltimore împreună cu soțul ei, fizicianul Sean M. Carroll, și cele două pisici ale lor, Ariel și Caliban.
